|
╚½Ū“╚╦╣żųŪ─▄ŅIė“ūŅŠ▀ė░Ēæ┴”Ą─┤¾Ģ■CVPRĮ³╚šą¹▓╝,īó2022─ĻĪ░ūŅ╝čīW╔·šō╬─Ī▒¬äŅCĮo═¼Ø·┤¾īWčąČ■īW╔·ĻÉ║ŁĻ╔Ą╚╚╦,▀@╩ŪČ■╩«ČÓ─ĻüĒ╩ū┤╬ėąųąć°Ė▀ąŻīW╔·½@┤╦╩ŌśsĪŻįōšō╬─╩ŪĻÉ║ŁĻ╔į┌░ó└’▀_─”į║īŹ┴ĢŲ┌ķgĄ─│╔╣¹,╚┌║Ž┴╦é„ĮyÄū║╬═Ų└Ē║═╔ŅČ╚īW┴Ģ,╠ß│÷┴╦ėŗ╦Ń3D╬’¾w╬╗ū╦Ą─ą┬ĘĮĘ©,─▄Å─å╬ÅłłDŲ¼ėŗ╦Ń│÷3D╬’¾wį┌šµīŹ╩└Įń└’Ą─╬╗ų├║═│»Ž“,ėą═¹│╔×ķūįäė±{±éĪóÖCŲ„╚╦Ą╚╝╝ąg░lš╣Ą─└Ēšōäė┴”ĪŻ
CVPR(ć°ļHėŗ╦ŃÖCęĢėX┼c─Ż╩ĮūRäeĢ■ūh)╩Ū╚╦╣żųŪ─▄ŅIė“Ą─Ēö╝ēīWągĢ■ūh,Į±─Ļ╣▓╩šĄĮ8161Ų¬šō╬─═ČĖÕ,ūŅĮKõø╚Ī2064Ų¬,ų╗įu│÷ūŅ╝čšō╬─║═ūŅ╝čīW╔·šō╬─Ė„1Ų¬ĪŻCVPRĄ─ūŅ╝čšō╬─║═ūŅ╝čīW╔·šō╬─│Ż▒╗ęĢū„AI╝╝ąg’LŽ“ś╦,šQ╔·┴╦ResNetĄ╚ę╗ŽĄ┴ąś╦ųŠ│╔╣¹ĪŻ
CVPRįńį┌2001─ĻŠ═įO┴óūŅ╝čīW╔·šō╬─¬ä,Į±─Ļ╩ū┤╬░lĮoųąć°Ė▀ąŻīW╔·ĪŻ½@¬äšō╬─ĪČEPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object Pose Estimation ĪĘüĒūį═¼Ø·┤¾īWŲ¹▄ćīWį║║═░ó└’░═░═▀_─”į║,ū„š▀Ęųäe╩ŪĻÉ║ŁĻ╔Īó═§ž¦│¼Īó═§Ę½Īó╠’¤śĪóą▄Ķ┤Īó└ŅĻ╗ĪŻ
½@¬äūCĢ°
šō╬─蹊┐Ą─╩Ū3DęĢėXŅIė“ĮøĄõå¢Ņ},═©▀^å╬ÅłłDŽ±Ū¾ĮŌ3D╬’¾wį┌šµīŹ╩└Įń└’Ą─╬╗ū╦(╬╗ų├║═│»Ž“)ĪŻ▀@ę╗╝╝ągĘĮŽ“æ¬ė├Ū░Š░ÅVķ¤,╩Ūūįäė±{±éĪóÖCŲ„╚╦Ą╚ąąśIĄ─╗∙ĄA╝╝ągĪŻ▒╚╚ńį┌ūįäė±{±éųą,ų╗ėąŽ╚ėŗ╦Ń│÷ų▄▀ģ▄ć▌vĄ─╬╗ū╦,┼ąöÓī”ĘĮŠ┐Š╣╩Ūę¬╝ė╦┘Īóäx▄ć▀Ć╩ŪūāĄ└,╝║ĘĮ▄ć▌v▓┼─▄ū÷│÷ī”æ¬▓┘ū„,ėŗ╦Ń▓╗£╩╗“š▀▀^┬²Č╝ėą┐╔─▄ę²░l╩┬╣╩ĪŻ
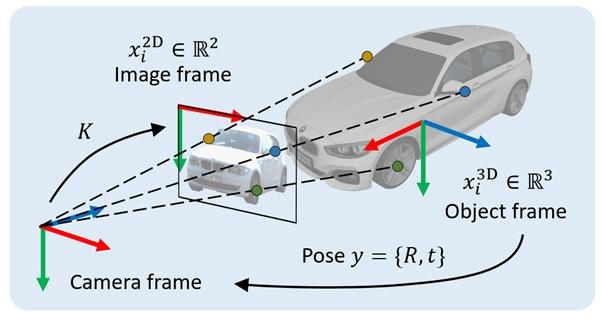
3D╬’¾wĄ─╬╗ū╦ėŗ╦Ń╩ŠęŌ
═©▀^å╬ÅłłDŽ±Č©╬╗3D╬’¾wśOŠ▀╠¶æąįĪŻę╗░Ńėąā╔ŅÉĮŌøQĘĮĘ©:ę╗ŅÉ╩Ū╗∙ė┌Äū║╬═Ų└Ē,└²╚ńPnP╦ŃĘ©,┐╔ĮŌßīąį║├ĪóĘ║╗»─▄┴”ÅŖ,Ą½ąĶę¬╠ßŪ░ų¬Ą└╬’¾wĄ─│▀┤ń║═ą╬ĀŅ,Š▀ėą▌^┤¾Ą─ŠųŽ▐ąį;┴Ēę╗ŅÉ╩Ū╔ŅČ╚īW┴ĢĘĮĘ©,┐╔ŅA£y3D╬’¾wĄ─╬╗ų├ū°ś╦║═│»Ž“ĮŪČ╚,Ą½į┌ąĪęÄ─ŻöĄō■╝»╔Ž╚▌ęū▀^öM║ŽĪŻ
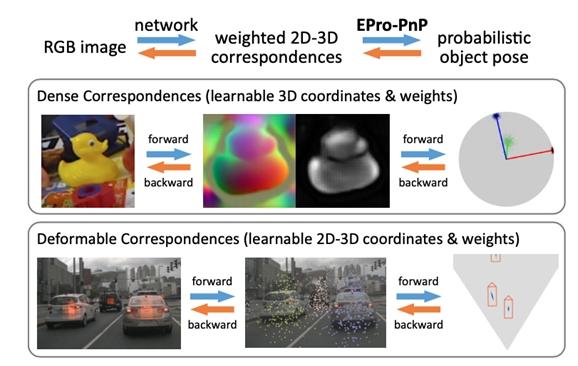
½@¬äšō╬─╠ß│÷Ą─ą┬ĘĮĘ©EPro-PnP,äōįņąįĄžę²╚ļĖ┼┬╩Ęų▓╝,īóÄū║╬═Ų└Ē║═╔ŅČ╚īW┴Ģā╔ĘNĘĮĘ©¤o┐pŃĢĮė,ą╬│╔┴╦ę╗éĆČ╦ĄĮČ╦Ą─ęūė├─Żą═,┐╔ęį┐ņ╦┘╣└╦Ń3D╬’¾wĄ─╬╗ū╦ĪŻīŹ“×ūC├„,ą┬─Żą══©ė├ąįÅŖĪóČ©╬╗£╩┤_,▓╗ąĶę¬╠ßŪ░ų¬Ą└╬’¾wĄ─Äū║╬ą╬ĀŅ;Ė³ę¬ųžĄ─╩ŪĘŪ│Ż║åØŹ,ą¦┬╩▌^Ė▀,ŪęŠ▀ėą▌^║├Ą─┐╔ĮŌßīąį,ėą═¹ė├ė┌ūįäė±{±éĪóÖCŲ„╚╦Īó¤o╚╦ÖCĪóARĄ╚ųTČÓąĶę¬═©▀^ęĢėXüĒ╣└╦Ń╬’¾w╬╗ū╦Ą─ł÷Š░ĪŻ
EPro-PnPĘĮĘ©╩ŠęŌ
ō■┴╦ĮŌ,šō╬─Ą┌ę╗ū„š▀ĻÉ║ŁĻ╔▒Š┤TČ╝Š═ūxė┌═¼Ø·┤¾īWŲ¹▄ćīWį║,─┐Ū░蹊┐╔·Č■─Ļ╝ēį┌ūx,ī¦Ä¤×ķą▄Ķ┤Į╠╩┌,Ė▒ī¦Ä¤×ķ╠’¤śų·└ĒĮ╠╩┌,▀_─”į║ī¦Ä¤×ķ═§ž¦│¼▓®╩┐ĪŻ╦¹Ą─蹊┐ĘĮŽ“╩Ūėŗ╦ŃÖCęĢėXųąĄ─3D╬’¾w╬╗ū╦╣└ėŗ,čąę╗Š═ęčį┌CVPR░l▒Ēšō╬─ĪŻ2021─ĻĄĮ░ó└’▀_─”į║ū÷蹊┐ą═īŹ┴Ģ╔·║¾,į┌▀_─”į║╚š│ŻčąŠ┐ėæšōųą┼÷ū▓│÷ņ`Ėą,ćLįć╚źśŗįņĮyę╗Ą─└Ēšō┐“╝▄ĪŻĪ░╬ęįŁüĒęį×ķ▀@Ų¬šō╬─┐╔─▄▒╚▌^└õķT,ę“×ķ╠½Ų½öĄīW,ø]ŽļĄĮ─▄ē“½@¬äĪŻĪ▒ĻÉ║ŁĻ╔šfĪŻ

▀_─”į║蹊┐ą═īŹ┴Ģ╔·Īó═¼Ø·┤¾īW蹊┐╔·ĻÉ║ŁĻ╔
šō╬─Ą┌ę╗═©ėŹū„š▀Īó▀_─”į║╦ŃĘ©īŻ╝ę═§ž¦│¼▓®╩┐▒Ē╩Š,▀@Ų¬šō╬─╠žäeų«╠Äį┌ė┌,ė├öĄīWĄ─ĘĮ╩ĮĮŌøQAIĄūīėå¢Ņ},ĦüĒ┴╦╗∙ĄA└Ēšō╔ŽĄ─═╗ŲŲ,ī”3DęĢėXŅIė“Ą─蹊┐║═æ¬ė├Č╝īó«a╔·ĘeśOė░ĒæĪŻĪ░║╦ą─äōą┬╩Ū▐DōQöĄīWęĢĮŪ,ę²╚ļĖ┼┬╩├▄Č╚,░č▓╗┐╔ī¦Ą─║»öĄūā│╔┐╔ī¦,╦∙ęį─▄═©▀^Ę┤Ž“é„▓źüĒė¢ŠÜ╔ŅČ╚ŠWĮj,ūŅĮKīŹ¼FĘĆČ©╩šö┐,╠ß╔²3D╬’¾wĄ─Č©╬╗Š½Č╚ĪŻĪ▒
ō■Žż,蹊┐ą═īŹ┴Ģ╔·╩Ū░ó└’░═░═į┌2017─Ļäō┴óĄ─┐ŲčąĒŚ─┐,ęč×ķ╚½Ū“200ČÓ╦∙Ēö╝ŌĖ▀ąŻĄ─1000ČÓ├¹īWūė╠ß╣®┐Ų蹏Å╬╗ĪŻ
šō╬─µ£Įė:https://arxiv.org/abs/2203.13254 |




![ĻPķ]┤░┐┌](http://www.f-s-a.com.cn/Images/pageclose.gif)